Motoarele moderne utilizate pentru propulsarea automobilelor, pe benzină sau diesel, sunt controlate în totalitate de sisteme electronice. Partea „inteligentă” a acestor sisteme de control este reprezentată de calculatorul de injecție. Acesta, pe baza informațiilor primite de la senzori (poziție, turație, presiune, etc.),
determină starea motorului și acționează asupra diferitelor actuatoare (injectoare, supape, motoare electrice, etc.) în scopul atingerii regimului de funcționare cerut de conducătorul auto (exprimat prin poziția pedalei de accelerație). În limba engleză calculatorul de injecție este abreviat ECU, ECM, EMS sau PCM.
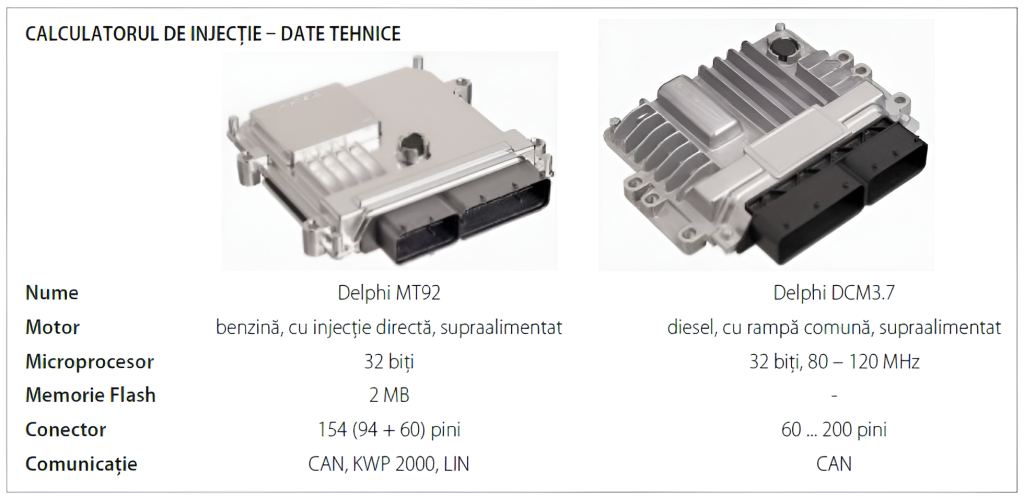
CALCULATORUL DE INJECȚIE DCM3.7
Calculatorul de injecție este proiectat să funcționeze în condiții de solicitări mecanice și termice extreme.
Acesta trebuie să lucreze la parametrii nominali fiind expus la:
o temperaturi extreme: -40…120 °C
o variații mari de temperatură
o expunere la contaminarea cu apă, ulei, combustibil, etc.
o praf, umezeală
o solicitări și vibrații mecanice
Pe lângă solicitările termice și mecanice funcționarea calculatorului de injecție trebuie să fie robustă și în cazul oscilațiilor de tensiune electrică sau în cazul expunerii la perturbații electromagnetice.
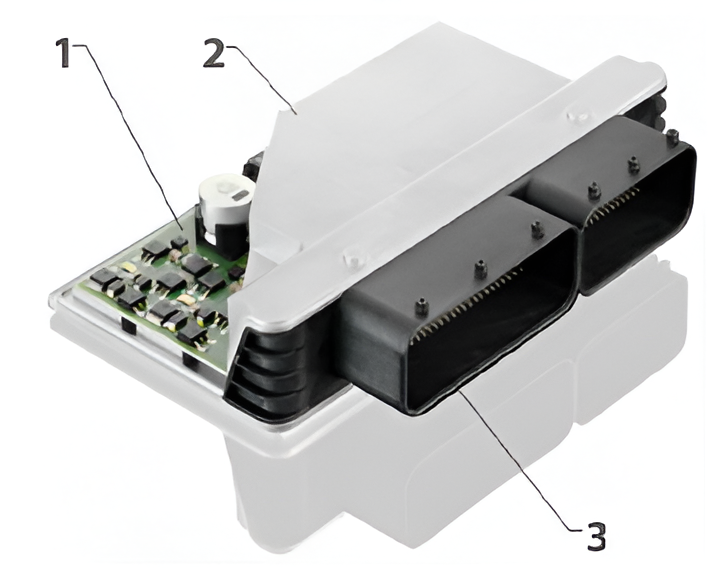
CALCULATORUL DE INJECȚIE EMS3
Principalele părți componente ale calculatorului de injecție sunt: carcasa (2) din plastic sau metal, placa de bază (1) ce conține circuitele electronice și conectorul (3) prin care se primesc semnalele electrice de la senzori și se comandă actuatoarele (supape, motoare, etc.).
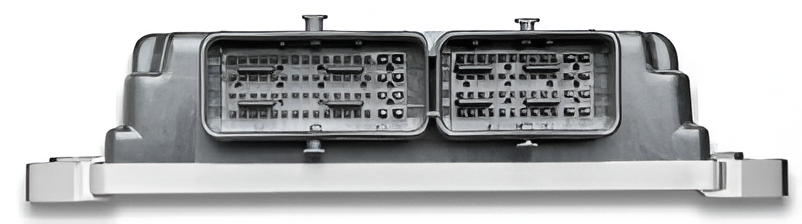
CALCULATORUL DE INJECȚIE MT62.1
În funcție de tipul motorului, benzină sau diesel, sau de sistemele auxiliare ale acestuia, conectorul are un număr variabili de pini (intrări de la senzori, comanda actuatoarelor, alimentare, etc.).La un motor modern calculatorul de injecție poate depăși ușor 100 de pini.
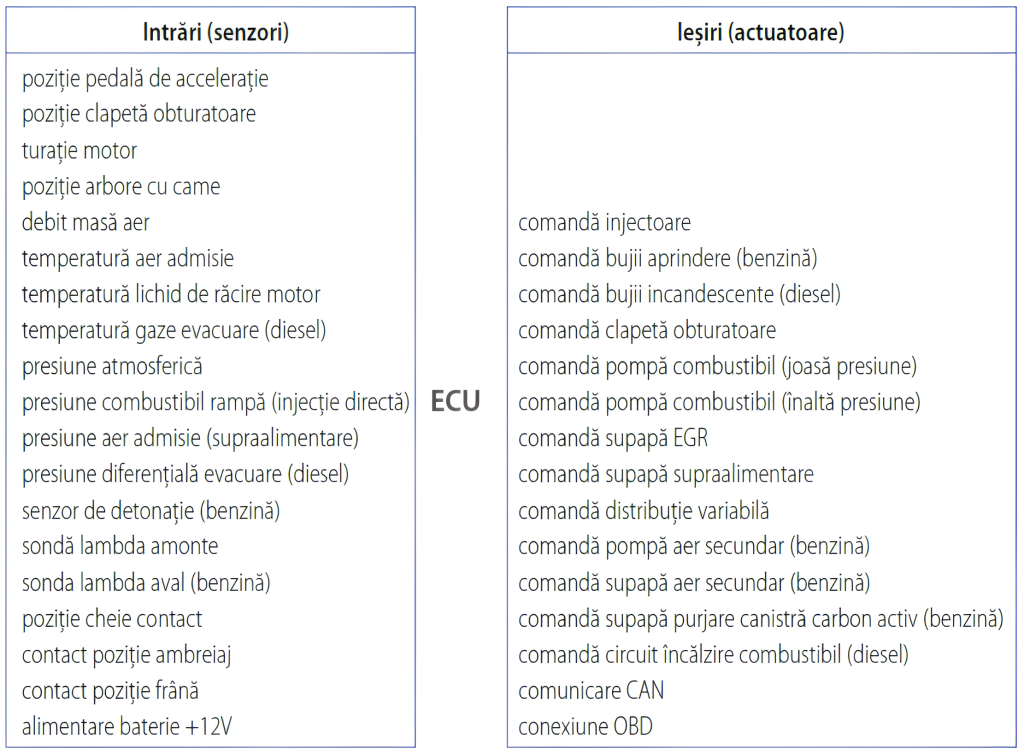
EXEMPLU DE INTRĂRI/IEȘIRI CALCULATOR DE INJECȚIE
Din punct de vedere funcțional un calculatorul de injecție are următoarele componente:
- blocul de alimentare de la baterie (+BAT)
- blocul de procesare a semnalelor de intrare
- unitatea centrală de procesare CPU (μCON TROLER – microcontroler)
- memoria non-volatilă (EEPROM)
- modulul de monitorizare
- etajul de amplificare a comenzii actuatoarelor
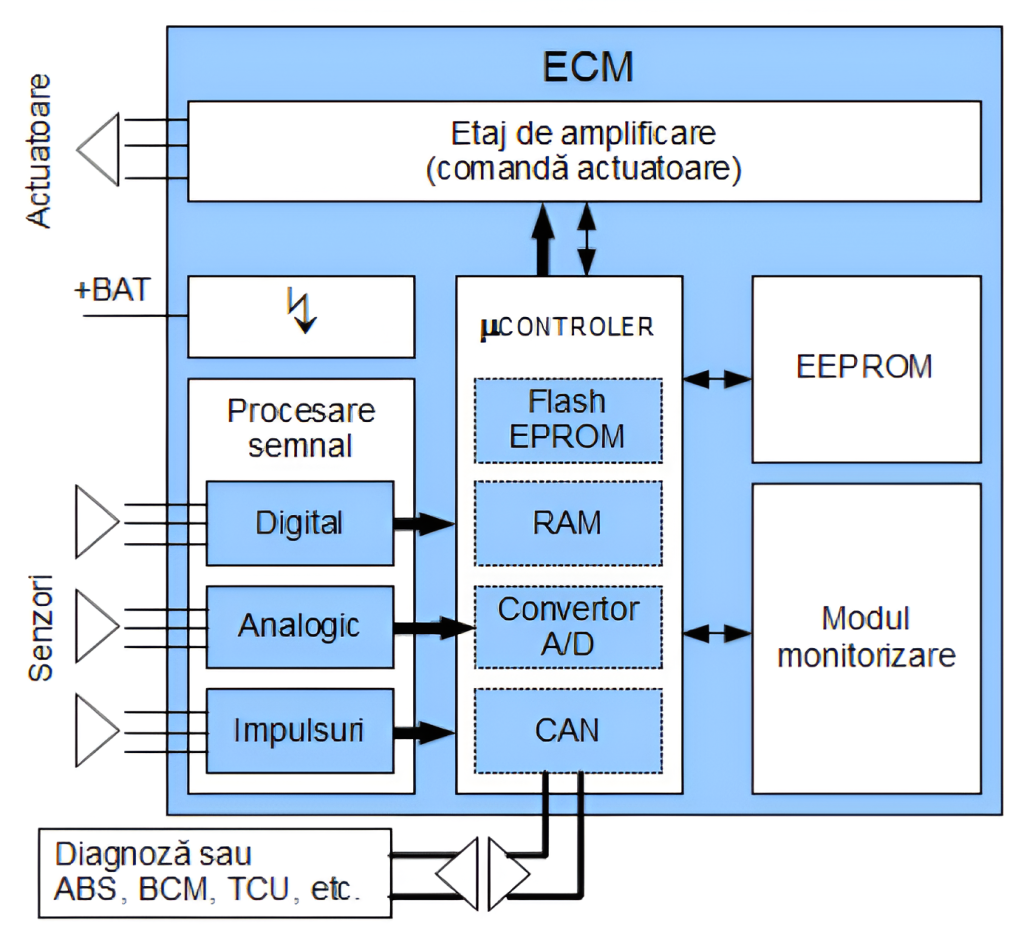
Procesarea semnalelor în calculatorul de injecție
Microcontrolerul este componenta electronică care realizează operațiile matematice și logice ale algoritmului de control. Acesta conține la rândul lui o memorie Flash EEPROM, o memorie RAM, un convertor A/D (analogic-digital) și un modul CAN.
FLASH EPROM
Această memorie este partajată de algoritmul de control al motorului precum și parametrizarea (calibrările) acestuia. Conținutul memoriei Flash EPROM poate fi reprogramat atât în zona algoritmului cât și a parametrizării, specificând zona de memorie ce se dorește a fi reprogramată. În cazul acestui tip de memorie, la reprogramare, se șterge și se rescrie tot conținutul dintr-o anumită zonă, nu se poate șterge individual a anume adresă de memorie.
RAM
Informațiile stocat în memoria RAM pot fi accesate direct, prin specificarea adresei din memorie. Datele pot fi scrise și citite de câte ori este nevoie, fără restricții. Acestă memorie este utilizată în timpul funcționării motorului și conține toate variabilele din algoritmul de control care sunt modificate (calculate). La oprirea motorului (întreruperea alimentării cu energie electrică) tot conținutul memoriei RAM este pierdut, cu excepția informației salvate în memoria nonvolatilă.
CONVERTOR A/D
Semnalele de intrare în calculatorul de injecție, în funcție de tipul senzorului, poate fi analogic sau digital. Un semnal analogic (poziția pedalei de accelerație, presiunea de supraalimentare, etc.) este de fapt o tensiune electrică, de obicei între 0 … 5V pentru senzori și 0 … 15V pentru bateria de acumulatori . Conversia acestora în valoare digitală, care poate fi interpretată de calculatorul de injecție, se face cu ajutorul unui convertor analog-digital. Anumiți senzori (cu efect Hall sau contacte) trimit semnalele digitale către calculatorul de injecție. Acestea au două nivele logice, 0 sau 1, reprezentate de 0 sau 5V. Microcontrolerul procesează direct aceste semnal fără a avea nevoie de o conversie adițională. Semnalul de turație al arborelui cotit este generat de un senzor inductiv. Acesta are formă de impulsuri periodice, este procesat în mod special de microcontroler și transformat ulterior în semnal digital. Modulul CAN realizează comunicarea cu restul calculatoarelor de pe automobil (ABS, BCM, TCU, etc.) și cu dispozitivele de diagnoză (scantool, aftersales).
CALCULATORUL DE INJECȚIE – CODURI DE EROARE OBD
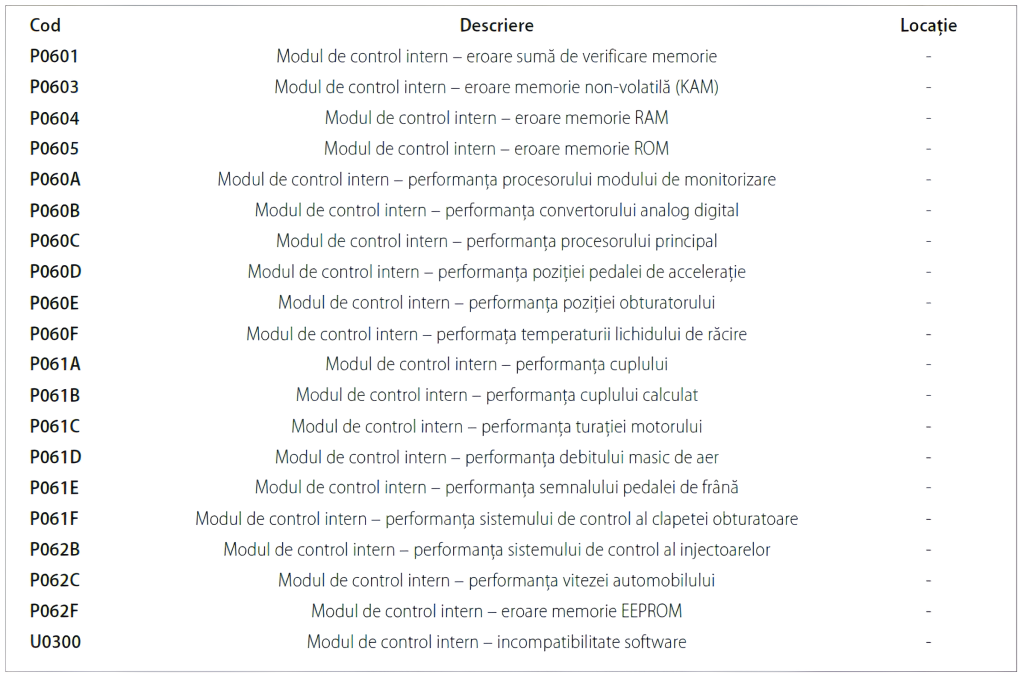
Cauzele apariției codurilor de eroare ale calculatorului de injecție sunt:
- tensiunea bateriei este în afara limitelor
- contact imprecis al pinilor calculatorului cu mufa de conectare
- defect intern de componentă (impune schimbarea calculatorului de injecție).



{kind=link}