Material exclusiv pentru abonați
Vehiculul modern are mulți ochi pe drum – mai ales dacă este autonom. Senzorii sunt o tehnologie cheie pentru viitorul automobilului și vin în multe forme pentru a ghida vehiculul pe drumul său, dar și pentru a activa funcții în interiorul unui cockpit din ce în ce mai digitalizat.
Totuși, atunci când vorbim despre senzori pentru automobile, este vorba de mai multe tipuri diferite de senzori: camere, radare și LiDAR. Unii senzori din mașinile actuale sunt rudimentari, în timp ce alții sunt mai avansați. Pe măsură ce vehiculele autonome avansează și mașinile în general devin mai inteligente, funcțiile pe care le susțin devin tot mai complexe, în timp ce tehnologiile de suport, inclusiv memoria, stocarea, puterea de calcul și conectivitatea, trebuie să formeze o platformă de calcul pe roți care să țină pasul.
Diferitele tehnologii de senzori au puncte forte diferite
Printre numeroșii senzori dintr-un vehicul modern se numără camere de luat vederi, radare și numeroase tipuri de LiDAR, în funcție de funcție. Primele aplicații ale senzorilor în autovehicule au fost pentru sistemele avansate de asistență de bază pentru șoferi (ADAS), cu camere de luat vederi din spate pentru a-i ajuta pe șoferi să dea cu spatele mai sigur. Cu cât vehiculul este mai autonom, cu atât mai mulți senzori sunt necesari. Senzorii care colectează informații despre mediul înconjurător al vehiculului, precum și despre interiorul habitaclului se împart în următoarele categorii generale:
Camere de luat vederi:
Senzorul care se apropie cel mai mult de viziunea umană, o cameră colectează imagini care vor fi analizate de algoritmi de calculator. Printre imaginile pe care le colectează o cameră pentru automobile se numără informații despre mediul înconjurător al mașinii, inclusiv despre alte vehicule, pietoni, bicicliști, indicatoare rutiere, semnale și traiectorii ale bordurilor.

Sursa foto © Caradas
Prelucrarea algoritmilor permite detectarea obiectelor necesare pentru avertizarea la părăsirea benzii de rulare și pentru avertizarea în caz de coliziune frontală. Despre camerele folosite în sistemele ADAS, vom vorbi în numărul următor.
Radar:
Un radar cu unde milimetrice (mmWave) poate „vedea” mai bine decât o cameră video, ceea ce îl face avantajos pentru anumite aplicații pentru automobile, având o rezoluție și o performanță ridicate și o bună directivitate, fiind în același timp mai puțin predispus la interferențe sau fiind afectat de condițiile meteorologice. Cu toate acestea, radarul cu unde mmWave este limitat la funcțiile ADAS din cauza costurilor mai ridicate; de asemenea, este mai puțin eficient pentru identificarea obiectelor nemetalice.

Sursa foto © Caradas
LiDAR:
O tehnologie de senzori bazată pe lumină, LiDAR trimite impulsuri de semnale laser rapide care se reflectă în obstacole, inclusiv alte vehicule, bicicliști, pietoni sau o cutie poștală la capătul unei alei. Un instrument bazat pe LiDAR măsoară timpul necesar pentru ca un impuls să ricoșeze înapoi, astfel încât distanța dintre vehicul și obstacol să poată fi calculată cu precizie. LiDAR-ul mecanic acționează direct un fascicul laser prin utilizarea unor piese mecanice. Deși este mai precis, oferă un câmp vizual de 360 de grade și se deplasează pe distanțe mai mari, LiDAR-ul mecanic este costisitor la fabricare. LiDAR cu semiconductori este mai accesibil, bazându-se în principal pe componente electronice pentru a controla unghiul de emisie laser, dar unghiurile de scanare sunt mai limitate și este mai puțin precis.

Sursa foto © Velodyne
3D Time of Flight (ToF) LiDAR:
Un alt tip de LiDAR care poate aborda un număr tot mai mare de cazuri de utilizare pe distanțe scurte în domeniul auto este 3DToF LiDAR, care nu necesită scaner și poate atinge un nivel mai ridicat de detaliu. Este un tip de LiDAR din ce în ce mai popular pentru multe dispozitive diferite, inclusiv pentru smartphone-uri, unde poate permite unui senzor de cameră să măsoare distanța și volumul folosind impulsuri optice de mare putere în durate de câteva nanosecunde pentru a capta informații de adâncime, de obicei pe distanțe scurte, dintr-o scenă de interes. Într-un mediu auto, 3DToF LiDAR poate scana și urmări obiecte, poate sprijini recunoașterea gesturilor și altimetrele reactive și poate crea o vedere de 360 de grade în afara vehiculului pentru a ajuta la parcare.

Sursa foto © Hitachi – LG Data Storage
LiDAR prezintă mai multe avantaje ca senzor pentru vehicule autonome. Are o rezoluție superioară în ceea ce privește distanța, unghiul și viteza, fiind în același timp mult mai puțin predispus la interferențe. De asemenea, LiDAR poate achiziționa o cantitate mare de informații, inclusiv distanța, unghiul, viteza și intensitatea de reflexie a unui obiect pentru a genera o imagine multidimensională a acestuia. Distanța este un factor determinant pentru a stabili dacă o arhitectură LiDAR pe distanțe scurte, medii sau lungi este cea mai bună, inclusiv pentru numeroase funcții în interiorul unui autovehicul, nu doar în exterior pentru a permite conducerea autonomă.
Senzori în interior și exterior
Indiferent de nivelul de autonomie, o capacitate mai mare de a „vedea” ceea ce se apropie este o funcție principală a tehnologiei senzorilor pentru automobile. Dar, pe măsură ce cabina de pilotaj a unui automobil obișnuit devine din ce în ce mai digitalizată, camerele de luat vederi, radarul și LiDAR au și ele un rol de jucat în interiorul vehiculului.
LiDAR pe distanțe scurte poate monitoriza starea șoferului și a pasagerilor pentru a susține caracteristici mai avansate. Printre acestea se numără ajustarea forței de declanșare a airbagurilor și optimizarea unui afișaj heads-up prin detectarea poziției capului și recunoașterea anumitor șoferi și pasageri prin recunoaștere facială pentru a ajusta preferințele predefinite. Comenzile fără atingere prin recunoașterea gesturilor pot fi, de asemenea, activate de LiDAR.
Există multe funcții de bază în automobile care ar putea fi realizate cu ajutorul tehnologiei gesturilor în locul celei tactile sau vocale, inclusiv comenzile de mediu, cum ar fi încălzirea și aerul condiționat, selecția și volumul muzicii, navigația GPS și gestionarea apelurilor vocale. În funcție de cât de avansat este cockpit-ul vehiculului, un șofer ar putea folosi un gest pentru a transfera aplicații de pe ecranul principal pe panoul de instrumente și invers.
Tehnologia de recunoaștere a gesturilor funcționează, în esență, prin recunoașterea mișcărilor umane ca metodă de introducere a datelor – anumite mișcări corespund unei comenzi – iar această introducere este detectată de senzori și camere care monitorizează mișcările oamenilor. Pe lângă faptul că permite șoferului să controleze muzica/audio și apelurile primite sau să navigheze prin sistemele telematice, tehnologia de recunoaștere a gesturilor poate detecta când un șofer ațipește sau este în dificultate din cauza unei probleme de sănătate bruște, permițând unui vehicul semiautonom să oprească în siguranță și să ceară ajutor.
De exemplu: Un șofer execută un gest cu mâna în raza de detecție a senzorilor ToF (zona roșie). Această configurație la bordul mașinii utilizează un computer mobil de tip tabletă și doi senzori ToF pentru a recunoaște gesturile mâinii în vederea controlului unui dispozitiv de infotainment (vezi Fig.5).
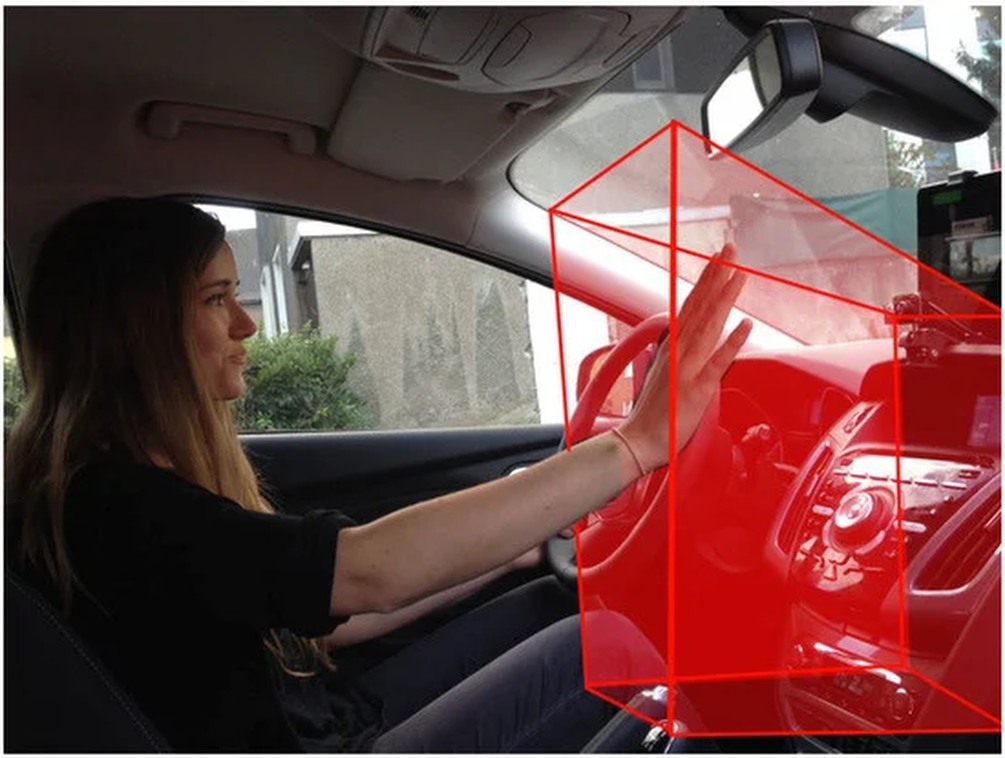
Sursa foto © ResearchGate
Indiferent de funcție, tehnologia de recunoaștere a gesturilor se bazează pe senzori, algoritmi și inteligență artificială (AI) pentru a detecta gesturi specifice și pentru a acționa în consecință, pe baza instruirii sistemului. Orice senzor sau cameră utilizată necesită o vedere liberă a unei zone 3D din cabina de pilotaj. Tehnologiile de viziune computerizată și de învățare automată alimentate de algoritmi și de inteligență artificială analizează gesturile în timp real și le traduc în comenzi în timp real pe baza unei biblioteci de mișcări ale mâinilor aflate deja la dosar.

Sursa foto © ResearchGate
LiDAR nu este doar o tehnologie de senzori care poate permite recunoașterea gesturilor în cabină. Senzorii radar care utilizează tehnologia mmWave pot oferi precizia mult îmbunătățită pentru aplicațiile din cabină și sunt superiori camerelor de luat vederi datorită capacităților lor fine de detectare a mișcărilor, care pot detecta și distinge mai multe persoane în interiorul unei mașini și chiar pot trece prin materiale precum plasticul, gips-cartonul și hainele. Acest lucru le permite să fie mai puțin invazive, deoarece senzorii pot fi ascunși în spatele unei borduri și plasați în interiorul sau sub alte materiale din interiorul vehiculului fără a compromite estetica acestuia, menținând în același timp intimitatea pasagerilor în cazul sistemelor de monitorizare din cabină.
Pentru aplicațiile din habitaclu, înseamnă că un radar cu unde milimetrice (fig 7) poate detecta prezența unei persoane chiar și în condiții de mediu dificile, cum ar fi lumina puternică și întunericul. senzorii radar mmWave pot discerne diferența dintre un copil și un adult așezat pe scaune, astfel încât desfășurarea airbagurilor să poată fi ajustată în consecință. mmWave poate detecta, de asemenea, cine nu ar trebui să se afle în vehicul, cum ar fi un potențial intrus în afara mașinii. O caracteristică mai avansată pentru detectarea radarului în habitaclu este monitorizarea ritmului cardiac și respirator atât al șoferului, cât și al pasagerilor, în timp ce mașina este în mișcare.

Sursa foto © D3 Engineering
Toate tehnologiile de detecție utilizate pentru aplicații auto avansează și evoluează – devin mai mici, mai puternice și mai puțin intruzive. Camerele de luat vederi, radarele și LiDAR, combinate cu o putere de calcul mai rapidă, sunt esențiale pentru a permite funcții mai inteligente în cabină și autonomie completă. Dar toate aceste progrese și evoluții necesită ca și alte componente electronice să țină pasul.
Mai mulți senzori necesită mai multă putere de calcul
Un automobil de astăzi poate conține peste 200 de senzori, în funcție de nivelul de autonomie, mai ales că tehnologiile de senzori, cum ar fi LiDAR, devin mai puțin costisitoare, mai mici și mai eficiente din punct de vedere energetic. De asemenea, senzorii devin din ce în ce mai eficienți din punct de vedere al datelor și sunt din ce în ce mai capabili să preia datele generate de mai multe tipuri de date din interiorul vehiculului pentru a le introduce într-o platformă de calcul pe roți.
Procesul de combinare a datelor provenite de la mai mulți senzori este cunoscut sub numele de „fuziune a senzorilor” și permite o mai mare precizie. Pentru vehiculele autonome, această fuziune înseamnă că se pot lua decizii mai sigure chiar dacă senzorii individuali nu sunt complet fiabili pe cont propriu. Cu cât este mai mare numărul de senzori de pe mașină, cu atât mai bine poate răspunde în timp real la diverse scenarii de conducere, inclusiv la alte mașini, persoane și animale de pe șosea.
Cu toate acestea, toate aceste date, precum și informațiile provenite de la un edge computing din jur care completează ceea ce mașina poate colecta singură, înseamnă că capacitățile de calcul ale automobilelor trebuie să țină pasul. Fiecare mașină va avea nevoie de memorie ultra-rapidă, de procesoare multi-core, de motoare grafice, de SSD-uri de capacitate mai mare și cu viteză mai mare bazate pe NVME și de conectivitate ultra-rapidă pentru a ingera, stoca și procesa cantitățile tot mai mari de date generate de mai multe tipuri de senzori pentru aproape toate funcțiile de conducere autonomă și din habitaclu.
Ing. Dumitru Arion



{kind=link}