Material exclusiv pentru abonați
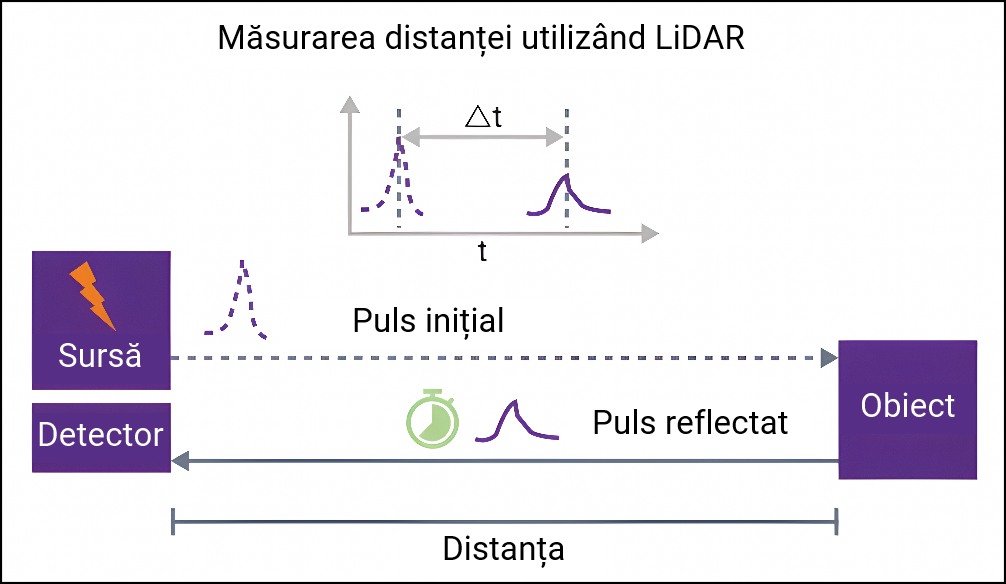
LiDAR (acronim pentru Light Detection and Ranging) este o tehnologie care permite scanarea și cartografierea oricărui mediu prin trimiterea de raze de lumină și măsurarea timpului necesar pentru ca acestea să se întoarcă la sursă (TOF = Time of Flight).
LiDAR este o tehnologie optică deseori citată ca fiind o metodă cheie pentru detectarea distanței pentru vehiculele autonome. Mulți producători lucrează la dezvoltarea unor sisteme LiDAR compacte și rentabile. Practic, toți producătorii care urmăresc conducerea autonomă consideră LiDAR ca fiind o tehnologie de bază esențială, iar unele sisteme LiDAR sunt deja disponibile pentru sistemele avansate de asistență a șoferului (ADAS).
Începând cu anii ’60, vedem că scanerele LiDAR sunt utilizate într-o gamă largă de produse de consum, de la aspiratoare robotizate până la – cel mai recent – popularul sistem de camere iPhone 12 Pro, care a fost lansat de Apple în 2020 pentru a îmbunătăți experiența AR a utilizatorilor săi.
Sursa foto © Buhlergroup
Cum funcționează LiDAR și cum oferă soluții?
În esență, LiDAR este un dispozitiv care măsoară distanța până la o țintă. Distanța se măsoară prin trimiterea unui impuls laser scurt și înregistrarea intervalului de timp dintre impulsul luminos emis și detectarea impulsului luminos reflectat (retrodifuzat).
Un sistem LiDAR poate utiliza o oglindă de scanare, mai multe fascicule laser sau alte mijloace pentru a „scana” spațiul obiectului. Având capacitatea de a furniza o măsurare precisă a distanțelor, LiDAR poate fi utilizat pentru a rezolva multe probleme diferite.
În teledetecție, sistemele LiDAR sunt utilizate pentru a măsura împrăștierea, absorbția sau reemisia de la particule sau molecule din atmosferă. În aceste scopuri, sistemele pot avea cerințe specifice privind lungimea de undă a fasciculelor laser. Se poate măsura concentrația unor anumite substanțe moleculare din atmosferă, de exemplu, metanul și încărcătura de aerosoli. Picăturile de ploaie din atmosferă pot fi măsurate pentru a estima distanța unei furtuni și rata de cădere a ploii.
Sursa foto © SYNOPSYS
Alte sisteme LiDAR oferă profiluri ale suprafețelor tridimensionale în spațiul obiectului. În aceste sisteme, fasciculele laser de sondare nu sunt legate de caracteristici spectrale specifice. În schimb, lungimea de undă a fasciculelor laser poate fi aleasă pentru a asigura siguranța ochilor sau pentru a evita caracteristicile spectrale atmosferice. Fascicululul de sondare întâlnește o „țintă dură” și este reflectat de aceasta către receptorul LiDAR.
LiDAR poate fi utilizat, de asemenea, pentru a determina viteza unei ținte. Acest lucru poate fi realizat fie prin tehnica Doppler, fie prin măsurarea distanței până la o țintă în succesiune rapidă. De exemplu, viteza vântului atmosferic și viteza unui automobil pot fi măsurate de un sistem LiDAR.
În plus, sistemele LiDAR pot fi utilizate pentru a crea un model tridimensional al unei scene dinamice, cum ar fi cea pe care o poate întâlni un vehicul cu conducere autonomă. Acest lucru poate fi realizat în diferite moduri, de obicei folosind o tehnică de scanare.

Sursa foto © SYNOPSYS
Care sunt provocările legate de LiDAR?
În esență, LiDAR este un dispozitiv care măsoară distanța până la o țintă. Distanța se măsoară prin trimiterea unui impuls laser scurt și prin înregistrarea intervalului de timp dintre impulsul luminos emis și detectarea impulsului luminos reflectat (retrodifuzat).
Sistemele LiDAR operaționale prezintă câteva provocări bine cunoscute. Aceste provocări depind de tipul de sistem LiDAR. Iată câteva exemple:
- Izolarea și respingerea semnalului din fasciculul emis – Radiația fasciculului de sondare este, în general, mult mai mare decât cea a fasciculului de întoarcere. Trebuie să se aibă grijă ca fasciculul de sondare să nu fie reflectat sau împrăștiat de sistem înapoi în receptor, astfel încât detectorul să fie saturat și să nu poată detecta țintele externe.
- Retururi bruște de la resturile din atmosferă dintre emițător și țintele vizate – Resturile pot provoca un retur bruște atât de puternic încât returul de la țintele vizate nu este detectat în mod fiabil.
- Limitări privind puterea optică disponibilă -Un sistem cu mai multă putere în fascicul oferă o precizie mai mare, dar este mai scump de operat.
- Viteza de scanare-Siguranța poate fi o problemă atunci când sursa laser funcționează la o frecvență periculoasă pentru ochii umani. Această problemă este atenuată de alte abordări, cum ar fi LiDAR flash, care iluminează o suprafață mare deodată și funcționează la lungimi de undă sigure pentru ochi.
- Diafonia dispozitivelor – semnalele provenite de la dispozitivele LiDAR din apropiere pot interfera cu semnalul de interes. Provocarea cu care ne confruntăm acum este cum să diferențiem semnalele emise de alte dispozitive LiDAR din apropiere. Sunt în curs de dezvoltare diverse abordări cu chirparea și izolarea semnalelor.
- Costul și întreținerea sistemelor LiDAR – Aceste sisteme sunt mai costisitoare decât alte tipuri de senzori, însă se lucrează activ pentru a depăși costurile ridicate și a produce sisteme la prețuri mai mici pentru o utilizare mai largă. Respingerea semnalelor provenite de la obiecte neintenționate – Acest aspect este similar cu respingerea semnalelor atmosferice bruște menționate anterior. Cu toate acestea, se poate întâmpla și în scenarii în aer liber. Rezolvarea acestei provocări implică, în general, minimizarea dimensiunii fasciculului la diferite distanțe ale țintei, precum și în câmpul de vizibilitate primit înapoi la receptorul LiDAR.
Sursa foto © MDPI
FMCW vs TOF LiDAR
Este important să cunoaștem diferența dintre TOF LiDAR și FMCW LiDAR, deoarece acesta din urmă aduce îmbunătățiri suplimentare tehnologiei, extinzându-i utilizarea în domeniul mobilității și al siguranței.
În ceea ce privește distanța și direcția obiectelor, atât TOF, cât și FMCW LiDAR detectează aceste două caracteristici; cu toate acestea, tehnologia FMCW este, de asemenea, capabilă să măsoare viteza de deplasare a obiectelor prin emiterea de fascicule laser, măsurând în același timp schimbările de frecvență ale fasciculelor reflectate de obiecte.
Aceste capacități permit FMCW LiDAR să detecteze obiectele în mișcare aflate în apropierea unui vehicul, cum ar fi pietonii și bicicletele, cu o precizie și o viteză mai mari.
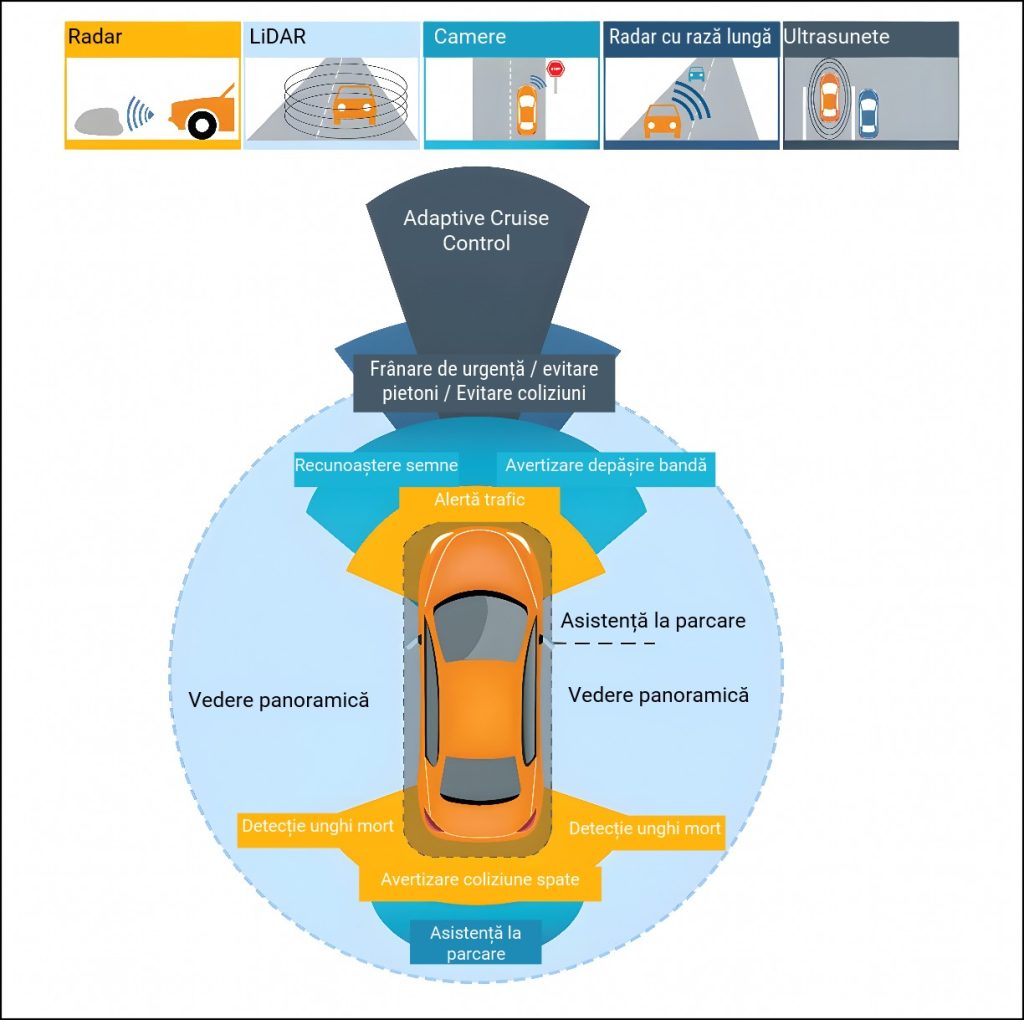
Utilizarea în autovehicule
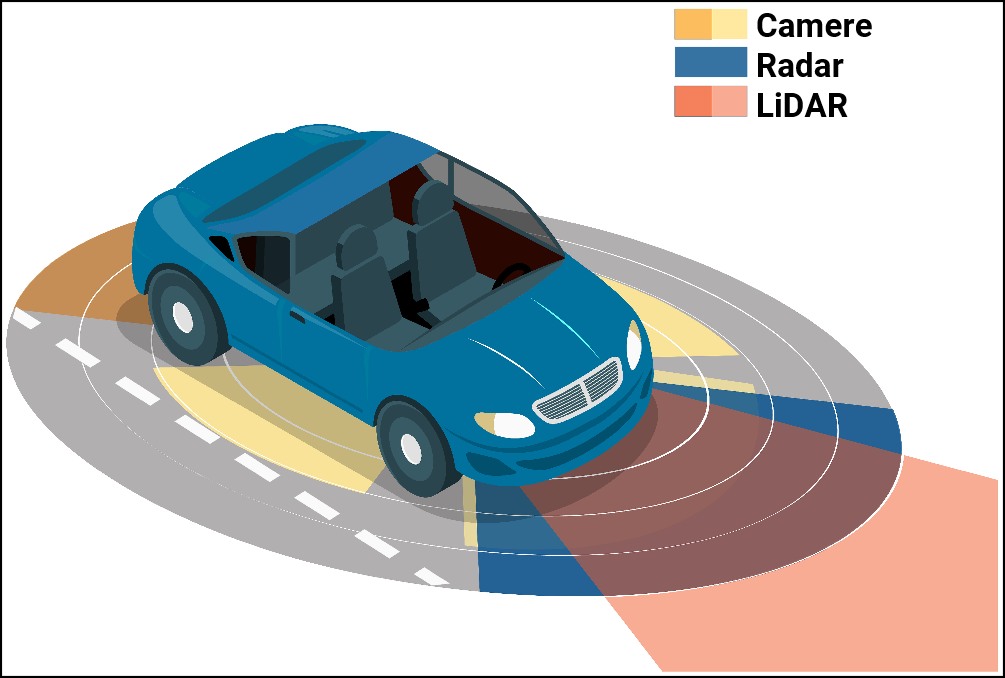
Dintre toți senzorii, LiDAR devine cel mai important în aplicațiile autonome, deoarece poate furniza până la 300 m de informații 3D în timp real despre împrejurimile vehiculului.
În comparație cu RADAR, care împărtășește același principiu de funcționare de măsurare a distanțelor pe baza timpului de călătorie dus-întors al unui semnal emis, LiDAR poate funcționa la frecvențe mult mai mari datorită proprietăților luminii.
În plus, în timp ce senzorii RADAR oferă doar rezoluții unghiulare de cel mult 1 grad, ceea ce este insuficient pentru estimarea formei obiectului, senzorii LiDAR pot atinge rezoluții de zecimi de grade.
Astfel, rezultatul lor poate fi utilizat pentru segmentarea obiectelor și nu doar pentru detectarea acestora. Cu toate acestea, deoarece senzorii LiDAR utilizează lumina, ei prezintă încă dezavantaje în comparație cu senzorii radio.
Deoarece lumina are o absorbție ridicată în apă, condițiile meteorologice nefavorabile, cum ar fi ploile abundente, pot afecta performanța generală a LiDAR.
Pe de altă parte, lungimile de undă mai mari utilizate în RADAR pot prezenta performanțe bune în condiții meteorologice nefavorabile, ceea ce face ca acest senzor să poată acoperi distanțe mai mari, dar cu o putere emisă mai mică.
Ing. Tudor Astăniloaie



{kind=link}